LRO-Kaguya-Watts Lunar Limb Profiles Window
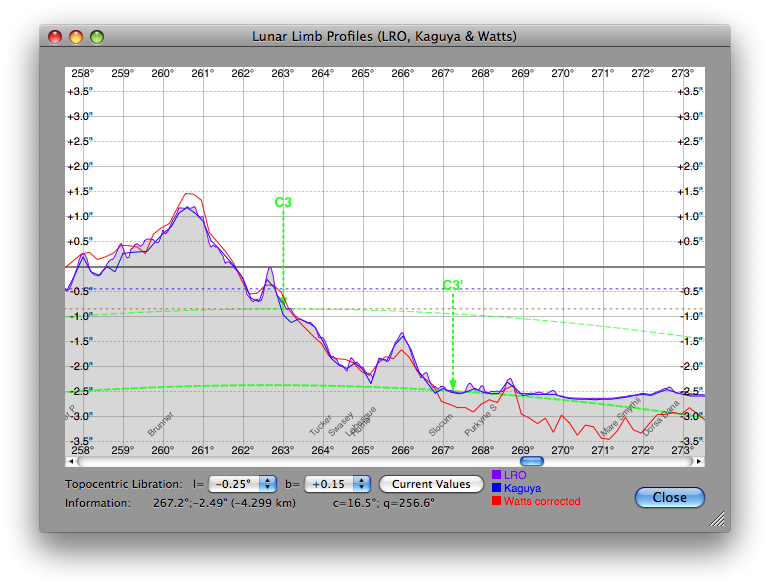
The window displays a graph of the LRO, Kaguya and Watts lunar limb profiles from the current location.
-
Choose Display > Lunar Limb Profiles Comparison…
|
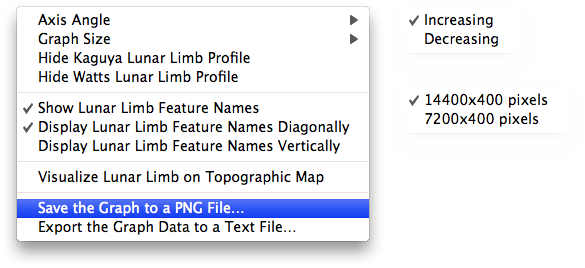
The Watts profile is the corrected one from Morrison/Appleby in 1981 and then later by Rosseló/Jordi in 1991. The Moon exhibits an irregular limb when seen in profile, due to its surface topography. Most eclipse calculations assume some mean radius that averages high mountain peaks and low valleys along the Moon’s rugged limb. Kaguya probe and Lunar Reconnaissance Orbiter data or Watts charts are used for higher accuracy in those calculations. The mauve limb is LRO, the blue limb Kaguya and the red is the one from Watts after correction. The brown dotted line charts the reduced mean lunar radius k2, usually used to compute the uncorrected second and third contacts and the umbral or ant-umbral path. The blue dotted line is the mean radius used for the data of the LRO and Kaguya probes. The LRO and Kaguya profiles are much more accurate than the Watts even after correction. The vertical axis unit is arc-seconds and the unit of the position angle of axis on the horizontal axis is degrees. The 0.241° difference between the Watts angles and the axis angle is also corrected. The positions of second and third contacts, corrected or not, are identified by the C2 and C3 symbols when uncorrected, C2' and C3' when corrected. The limb of the Sun is also displayed as a dotted curve in orange for second contact and in green for third contact. A click anywhere on the graph will reveal the position angle of axis value and the height with reference to the IAU mean lunar radius (1738.091 kilometers or k = 0.2725076). The name of lunar features is displayed along the lunar limb to help identify the characteristics of the contacts. A contextual menu, that can be invoked with a right click, will let you select various options:
A clic anywhere in the graph area will display in the lower left corner of the window the corresponding values of the position angle of axis in degrees and the limb height in arc-seconds. |